INDUSTRIAL ROBOTICS for III - II MECH JNTUK (R16) UNIT - II
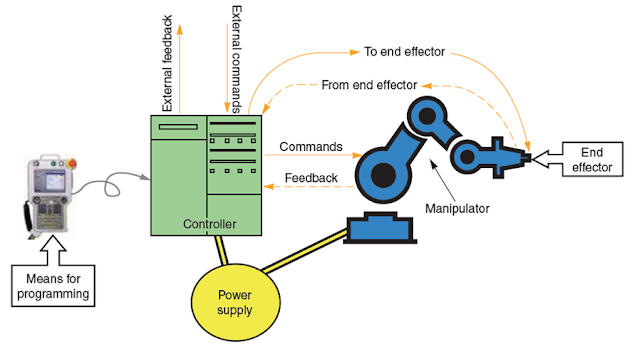
UNIT - II: Components of the Industrial Robotics Main components of an Industrial Robot: A typical stand-alone robot shown in the figure below comprises of the following basic components, namely. Manipulator (Mechanical Arm) Sensors devices (Feedback Components) Robot Tooling (End-effector) Robot controller unit (RCU) Basic components of an Industrial Robot and Their Connectivity. Manipulator: It consists of base, arm, & wrist similar to a human arm. It also includes power source either electric, hydraulic or pneumatic on receiving signals from robot controller this mechanical unit will be activated. The movement of the manipulator can be in relation to its coordinate system. Which may be Cartesian, Cylindrical. etc. Depending on the controller, the movement may be a point to point motion or continuous motion. The manipulator is composed of 3 divisions, The major linkages The minor linkages (wrist components) ...
